|
Caddy
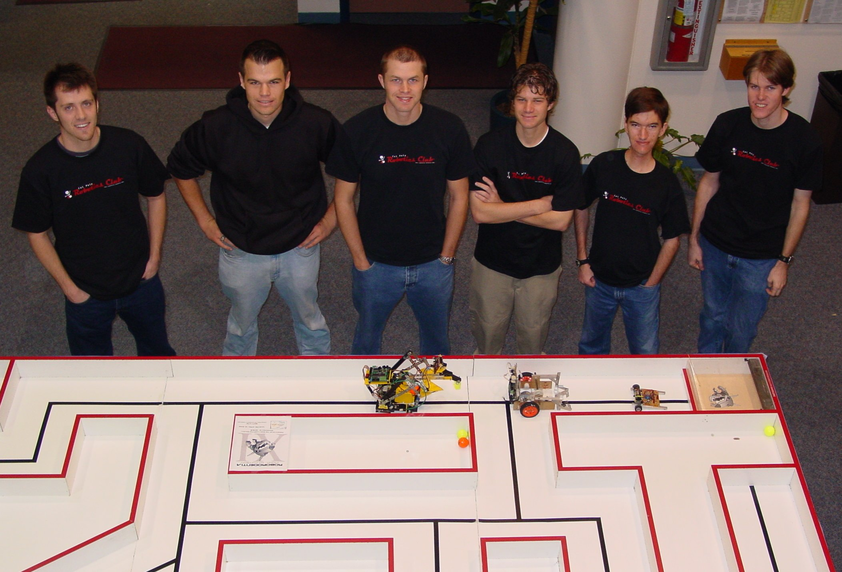
A 2005 Roborodentia entry with vision and path planning capability
|
|
Caddy
A 2005 Roborodentia entry with vision and path planning capability
|
Caddy was a joint effort between Taylor Braun-Jones, Logan Kinde, Tyson Messori, Scott Barlow, Michael Shelley, and Patrick McCarty. Primary contributors were Taylor Braun-Jones, Logan Kinde, and Tyson Messori.
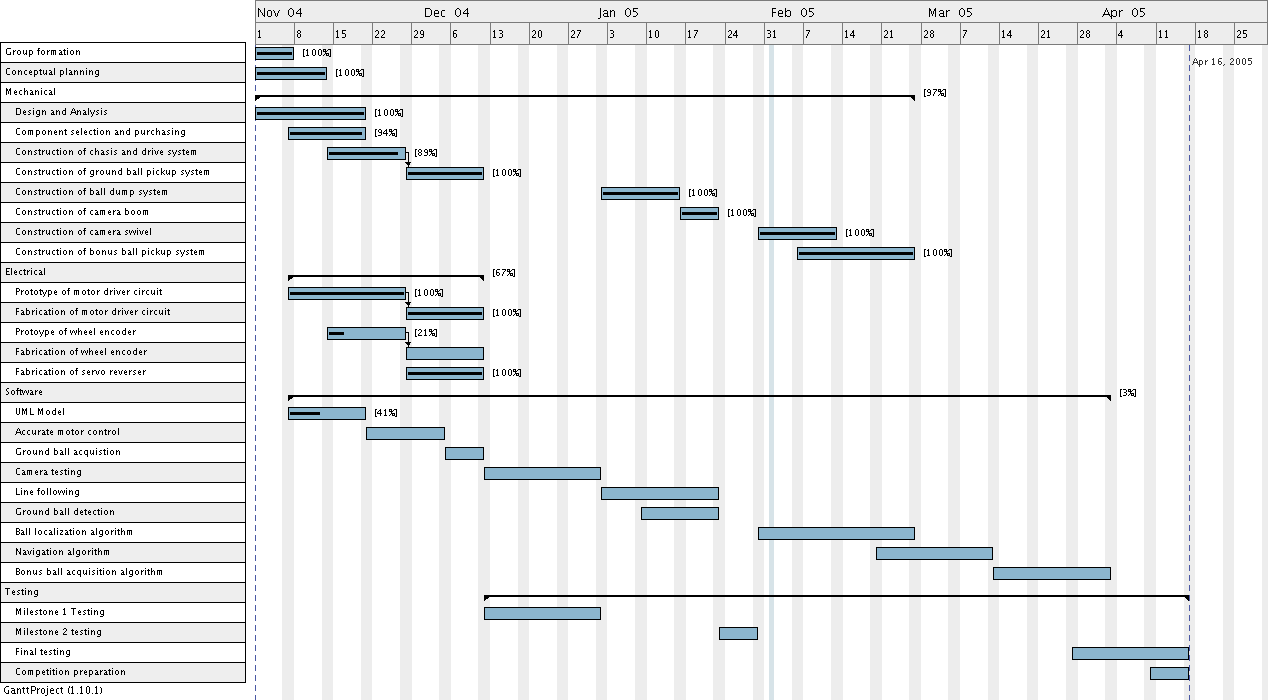
Taylor was responsible for overall project coordination and administration including:
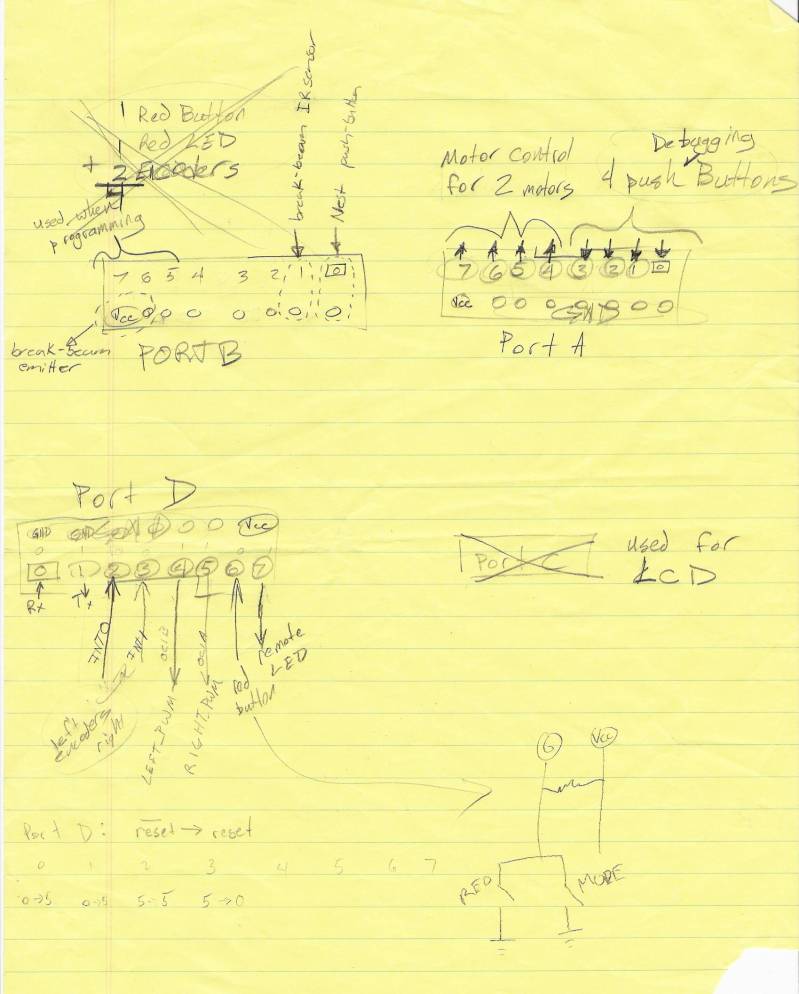
Taylor's electrical and mechanical contributions include:
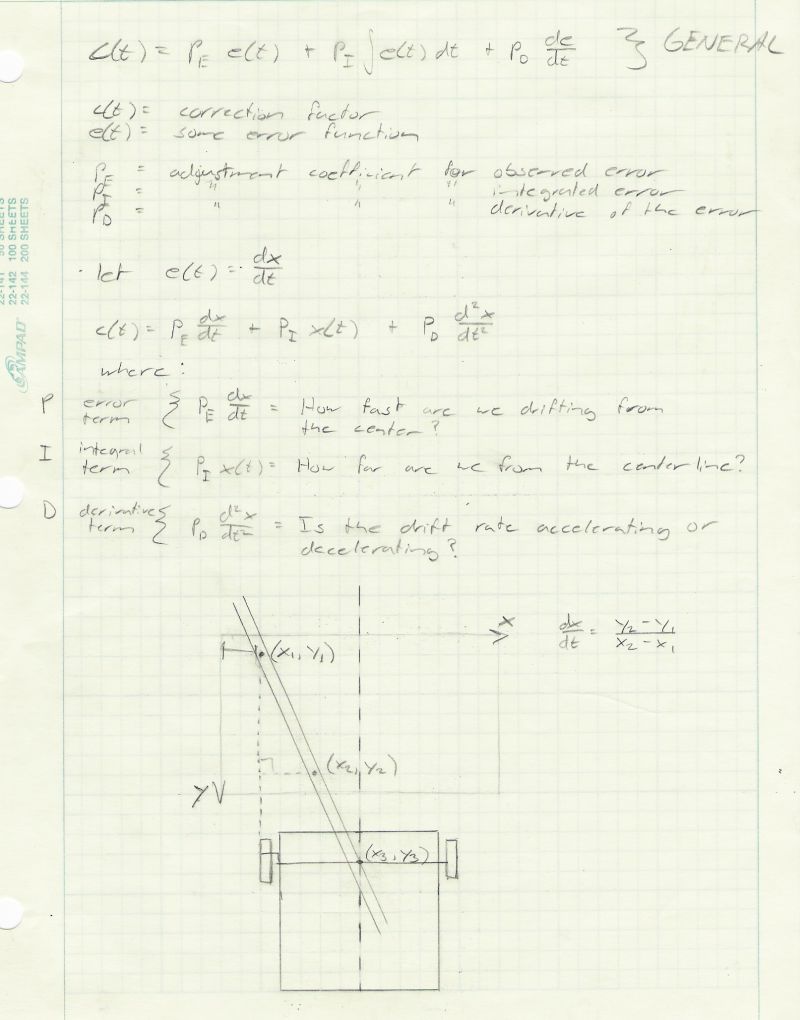
The software contributions are attributed as follows:
The rest of the code and the majority of the code base was developed between Taylor and Logan together using the pair programming technique. These pieces include:
This project was made possible by a generous $525 grant from the Cal Poly Mechanical Engineering Student Fee Allocation Committee (MESFAC) and from various part and monetary contributions of the the Cal Poly Robotics Club.
 1.8.1.2
1.8.1.2


{kind=link}
{kind=link}